Project Overview
The Spacecraft Thermal Control System (STCS) represents a sophisticated embedded systems project designed to address the critical thermal management challenges faced by spacecraft in the harsh environment of space. The system ensures mission longevity, crew safety, and technological reliability through a distributed architecture that combines real-time simulation, precise control algorithms, and comprehensive visualization capabilities.
System Architecture
The STCS implements a multi-device distributed architecture with three specialized processing units, each serving a distinct function:
1. Thermal Simulation Library (STM32F767ZI - NUCLEO Board)
- Simulates 4 thermistor-heater pairs with environmental cycles
- Implements entropy-based data generation for realistic conditions
- Manages thermal profiles including eclipse and sun exposure periods
- Communicates via UART with other system components
2. Thermal Control Function (STM32F746NG - DISCO Board)
- Implements PID-based control algorithms for temperature regulation
- Dynamically adjusts heater outputs based on thermistor feedback
- Supports configurable setpoints between -20°C and 20°C
- Provides real-time data acquisition at 1-5Hz frequency
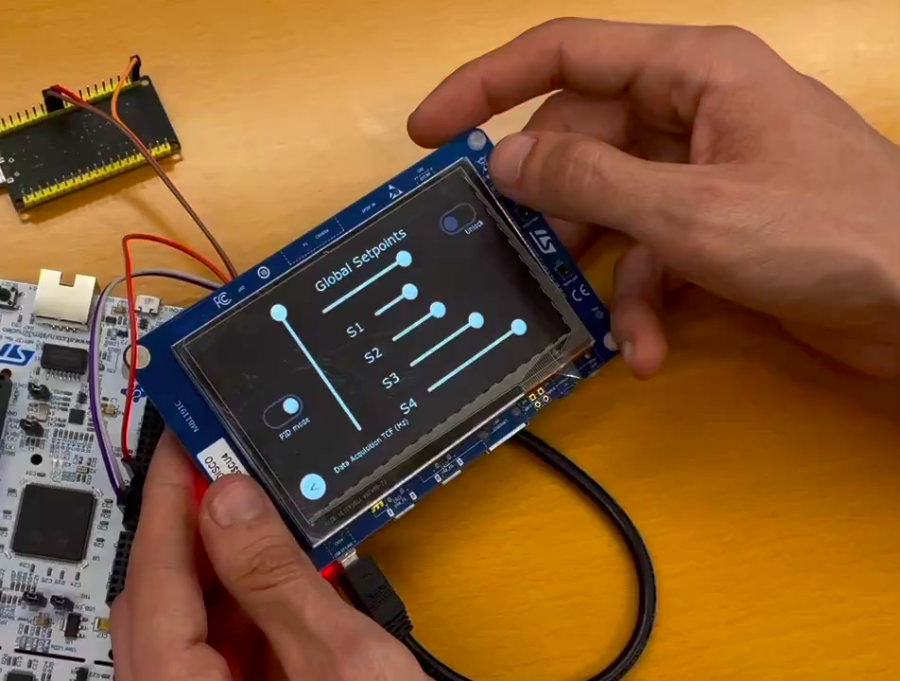
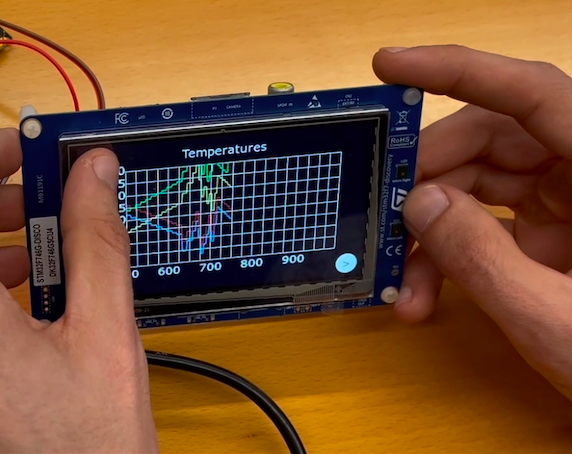
3. Visualization User Interface (ESP32 DevKit V1)
- Implements MQTT protocol for real-time data streaming
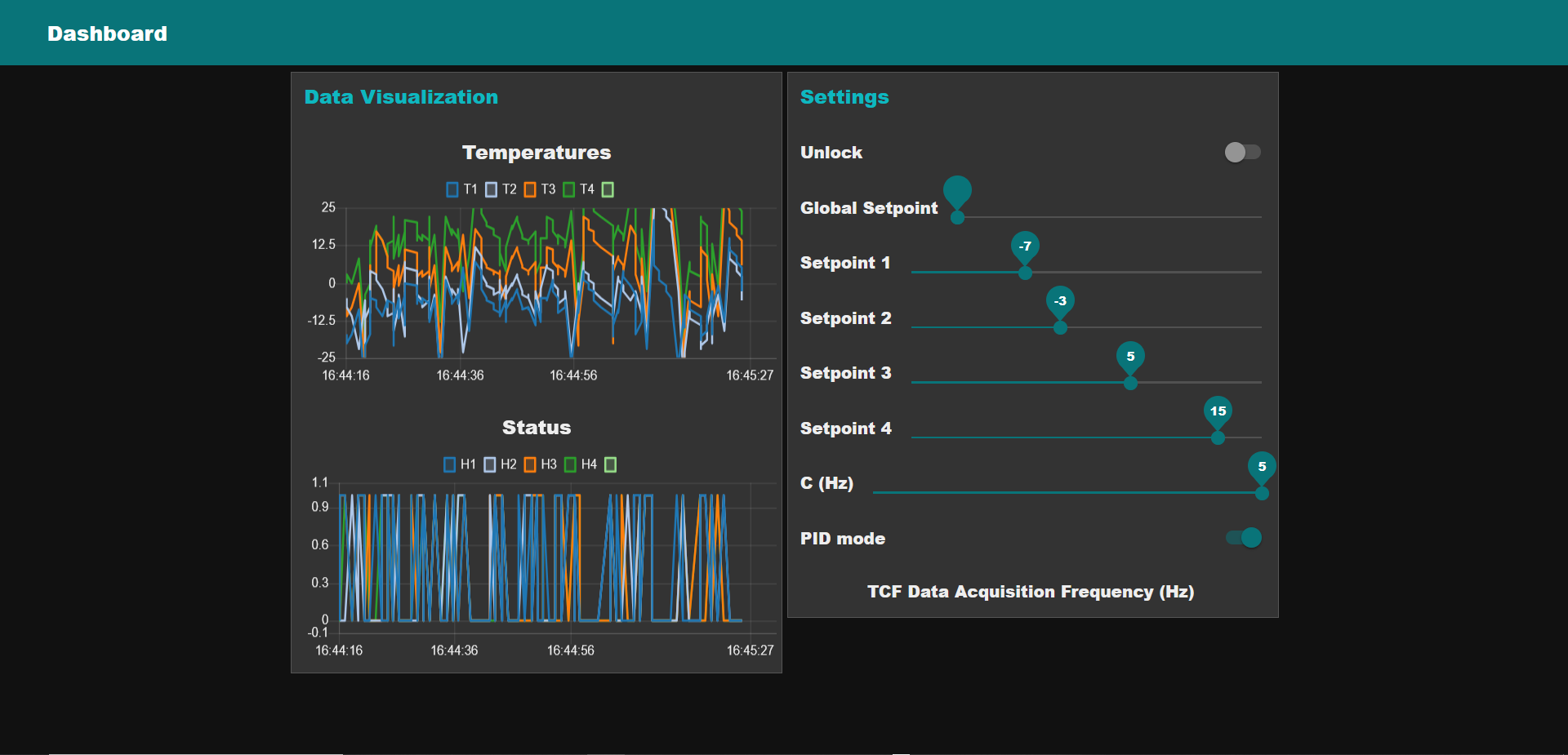
- Provides both web-based (Node-RED) and embedded (TouchGFX) interfaces
- Enables remote monitoring and control of thermal parameters
- Supports data visualization with configurable time ranges (1-75 seconds)
Mathematical Foundation
The system employs PID control algorithms for temperature regulation, represented by:
\[\scriptsize{u(t) = K_p e(t) + K_i \int_0^t e(\tau)d\tau + K_d \frac{de(t)}{dt}}\]
Where:
- \(u(t)\) represents the control output (heater power level)
- \(e(t)\) denotes the error term (difference between setpoint and actual temperature)
- \(K_p\), \(K_i\), and \(K_d\) are the proportional, integral, and derivative gains respectively
The thermal simulation incorporates environmental factors through:
\[\scriptsize{T_{actual} = T_{base} + \Delta T_{solar} + \Delta T_{eclipse} + \epsilon_{entropy}}\]
Where entropy-based variations (\(\epsilon_{entropy}\)) simulate real-space environmental uncertainties.
Implementation Details
Communication Protocol
The system uses custom UART-based communication with structured data framing:
Code Implementation
// Thermal control task implementation
void controllerTask(void *pvParameters) {
HAL_UART_Transmit(&huart6, (uint8_t*)thermistors,
sizeof(Thermistor) * NUM_THERMISTORS, HAL_MAX_DELAY);
char msg[] = "T1=64,T2=64,T3=64,T4=64 H1=64,H2=64,H3=64,H4=64\n";
HAL_UART_Transmit(&huart7, (uint8_t*)msg, strlen(msg), HAL_MAX_DELAY);
vTaskDelay(pdMS_TO_TICKS(ctrl_delay));
}
Real-time Data Processing
Data acquisition frequencies are configurable with:
| Parameter |
Range |
| TCF_Data_Aquisition_Frequency |
1-5Hz |
| VUI_Data_Aquisition_Frequency |
1-5Hz |
| VUI_Plot_Time_Range |
1-75 sec |
The system supports two operational modes:
- PID Mode: Closed-loop control with continuous adjustment
- Manual Mode: Direct heater control for testing purposes
Implementation Details
The project was developed using:
- STM32CubeIDE for microcontroller programming
- FreeRTOS for task scheduling and management
- TouchGFX for embedded GUI development
- Node-RED for web-based dashboard
- MQTT protocol for real-time data streaming
Configuration parameters are stored in flash memory:
// Setpoint constraints
Setpoint_THERM-01 = -7
Setpoint_THERM-02 = -5
Setpoint_THERM-03 = 10
Setpoint_THERM-04 = -14
Educational Context
This project was developed as part of the C/C++ Embedded Systems Programming curriculum at Politécnico de Coimbra (Oct 2024 – Aug 2025), focusing on:
- Real-time operating systems implementation
- Multi-device communication protocols
- Control theory applications in embedded systems
- Space environment simulation techniques